
Case Study - Mirror Line Loading Robot

The Customer:
A high-end manufacturer of mirrored glass products was looking for a way to automate loading glass onto a highly flexible mirror coating line. They had hard-automation to drop the big sheets onto the line, but needed a way to efficiently fill the line with smaller sheets to meet increasing customer demand for custom orders.
The Problem:
- In order to maximize usage of mirror coatings, the customer needs the line to be filled with minimum gaps between the glass.
- Glass is shipped from the source in various packages. Racks of glass for some larger sizes and wooden crates for smaller sizes.
- Glass must be entered onto the line at a precise rate to ensure consistency of the coating.
The Solution:
The Opus robot solution started with a big, strong KUKA KR180 six-axis robot.
To that we added a tooling design based on two sizes of box grippers and an articulated rack-gripper. |
|

|
Each gripper is stored in a rack and an ATI tool changer allowed the robot to select the appropriate tool for the size and package, as chosen by the operator from the HMI menu. |
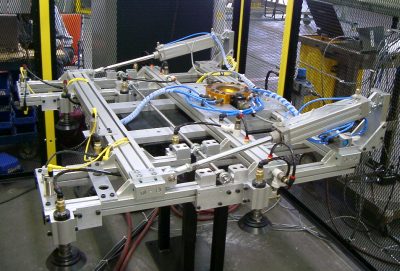
Sophisticated sensors on the gripper detect the edges and surface of the next lite to be acquired so the glass will be carried exactly at the right position on the robot end-effector. That allows precise positioning of the glass on the conveyor. Pattern-building software and sensors on the glass conveyors command the precise location of the robot drop, all to present a nearly seamless pattern of glass to the coating line.
Success:
The customer has been reliably running this automation for 15 years.
Back